The evolution of IVN architectures
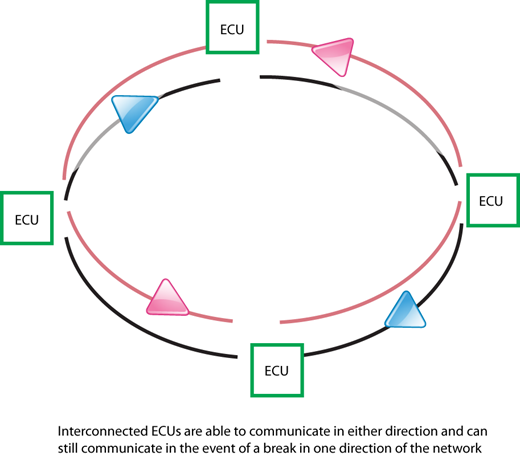
The earliest incarnation of an IVN was the Local Interconnect Network or LIN, a simple single-wire protocol where a master controller controls a group of slaves, each identified by an ID. Invented later, in the late 1980s by Bosch, the connected area network (CAN) bus IVN is a point-to-point system that wires all ECUs (nodes) to each other. Communication is packet based via a single twisted pair cable. The data rate capabilities are comparatively low; the system is asynchronous, hence unsuitable for time-critical operation. However, it does feature a unique non-destructive arbitration method for handling message collisions. Both systems feature today for non-time critical systems such as windows, lights, rain sensors, and door locks. Several alternative protocols, including “FlexRay”, MOST, and CAN FD (FD = flexible data rate), came to market to increase data rate capabilities.
Figure 1 shows the various IVN types and data rates.
However, the benefits of scalability and adaptability that Ethernet offered made it an enticing choice for designers. To successfully integrate Ethernet into the automotive environment, modifications are needed to reduce susceptibility to electromagnetic interference (EMI), add time sensitivity (TSN), and improve robustness and reliability. By exploiting the versatility of the original Ethernet design, a modified communications interface (Physical Layer), more resilient to the hostile automotive environment, is implemented.
The modified physical layer employs single unscreened twisted pair (UTP) cable, transformer coupling, and full duplex capability, with a range of 15m.
Ethernet is exceptionally versatile; ECU nodes can be added at will without reprogramming. Collisions are eliminated because the system is full duplex (data can be transmitted and received simultaneously). Traffic is optimised, and virtual sub-networks are created by adding intelligent switches.
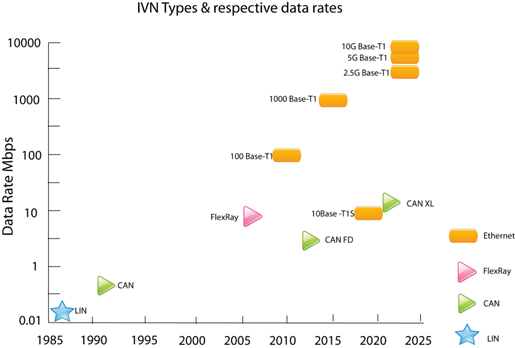
ECUs connected in a ring topology, as shown in Figure 2, offer a level of parallel redundancy suitable for time-critical safety systems. As communication is full duplex, communication can occur in the other direction if there is a break in the ring at any point.